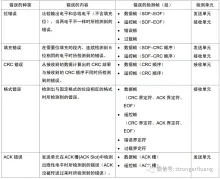
<strong>一、五种CAN总线可能发生的错误</strong>
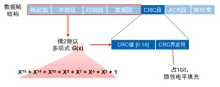
1、CRC错误:
接收节点计算出的CRC校验值,与发送节点计算的结果不一致;
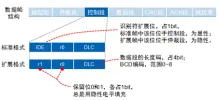
2、格式错误:
传输的数据帧格式,与任何一种帧格式都不符;
3、应答错误:
ACK段,发送节点没有收到接收节点发出的应答(显性位);
单节点的CAN设备发送数据帧时为发生应答错误;
4、位发送错误:
发送过程中,发送节点发送的同时监听总线电平,如果总线电平和发送的不一致;
在仲裁域发现不同不报错,因为就是要仲裁掉优先级低的报文;
发送被动错误标志、主动错误标志期间检测总线电平有6个相同位时;
5、位填充错误:
帧起始到CRC之间,接收节点检测到有6个连续相同的位电平时,也就是违反5位相同位插入1位相反位的“位填充”原则;
因为ACK域和帧结束域电平固定,也无需填充;
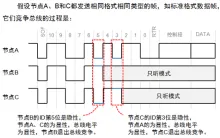
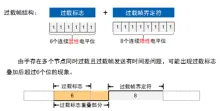
<strong>二、三种错误状态</strong>
主动错误标识——6个显性位、由主动错误节点发出
被动错误标识——6个隐性位、由被动错误标志发出















{kind=link}
{kind=link}